Objective
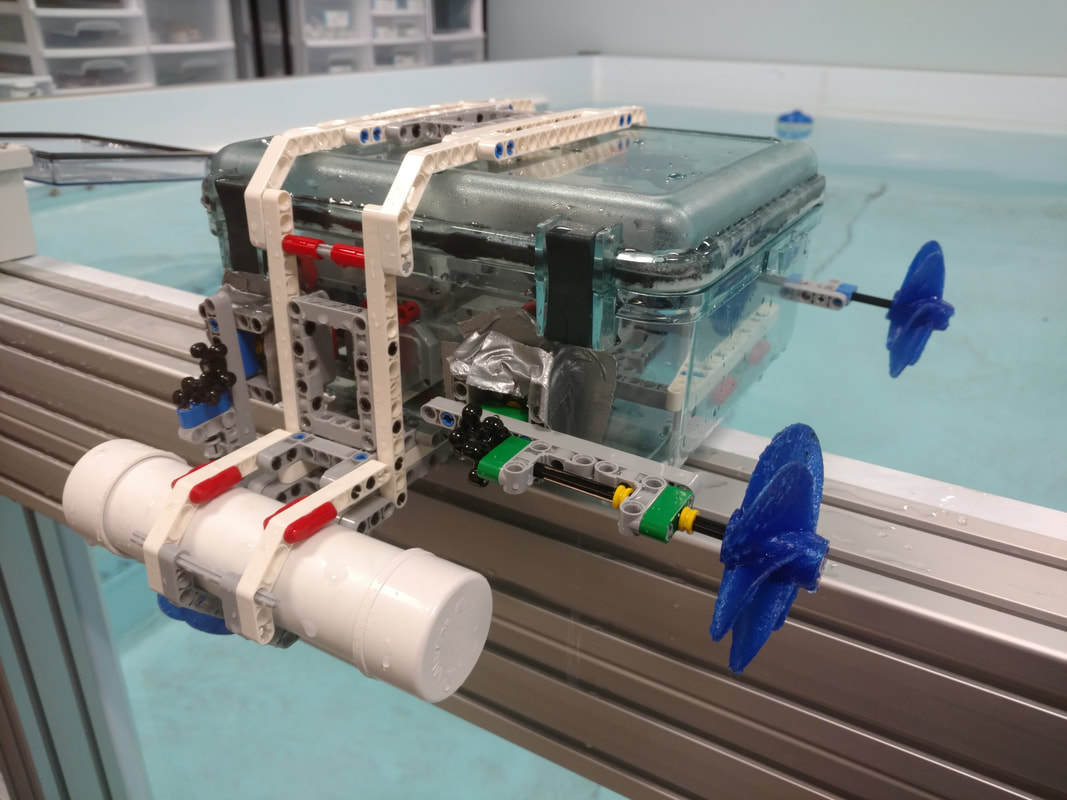
Over a period of 6 weeks, during Summer 2018 and in the MIT Media Lab, a team of four engineers designed, prototyped, and produced eight working underwater rovers centered around LEGO Mindstorms. While one focused on programming in Scratch X to control the movements of the rover, I, along with two others, worked on the entire design (mechanical and electrical) of the rover, from start to end. Given only LEGO Mindstorms EV3 kits, we had to find the ultimate use of additional objects, or lego/propeller/cable extension design to maximize speed, productivity, and usability for our purposes. The objective of the rovers, named LEGO Wayfinder, are used for educational purposes and will be expanded to middle school students to explore underwater sea life and other biology related concepts.
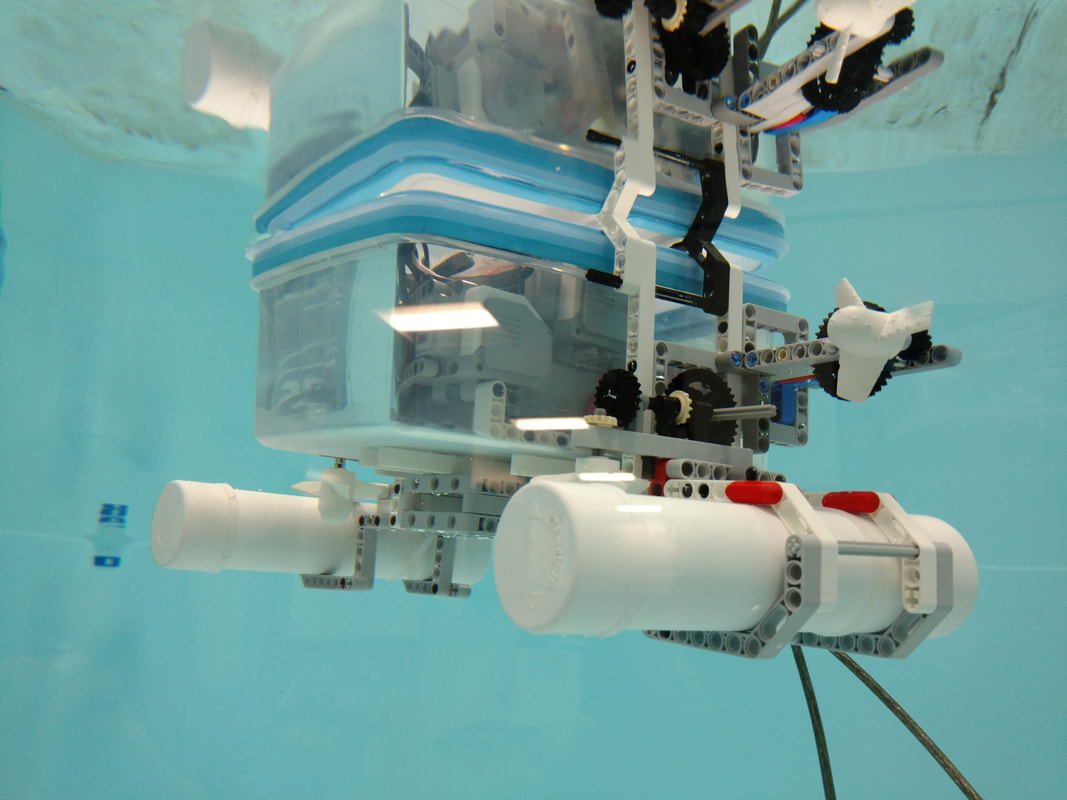
Our rovers were presented and used at a expedition held by National Geographic for high school students. There, we deployed our rovers in the Charles River and the Boston Harbor to collect data using salinity, temperature, and pressure sensors, and collect images and videos using a webcam inside the rover.
Our rovers were presented and used at a expedition held by National Geographic for high school students. There, we deployed our rovers in the Charles River and the Boston Harbor to collect data using salinity, temperature, and pressure sensors, and collect images and videos using a webcam inside the rover.

Main Components
- Box/Container - water tightness
- Propeller - movement
- Gearing/Magnetic Coupling - speed
- Electrical Components - extensions
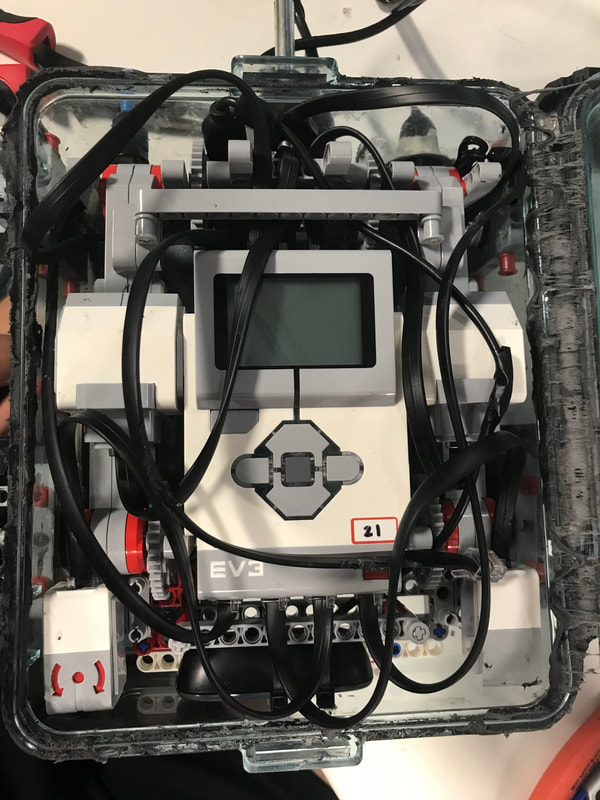
Box/Container
|
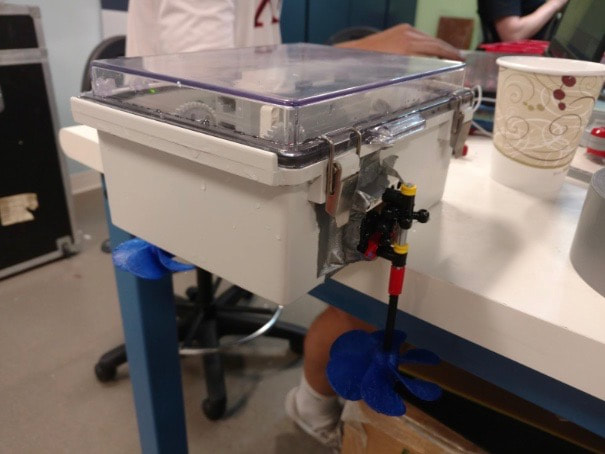
Container 1:
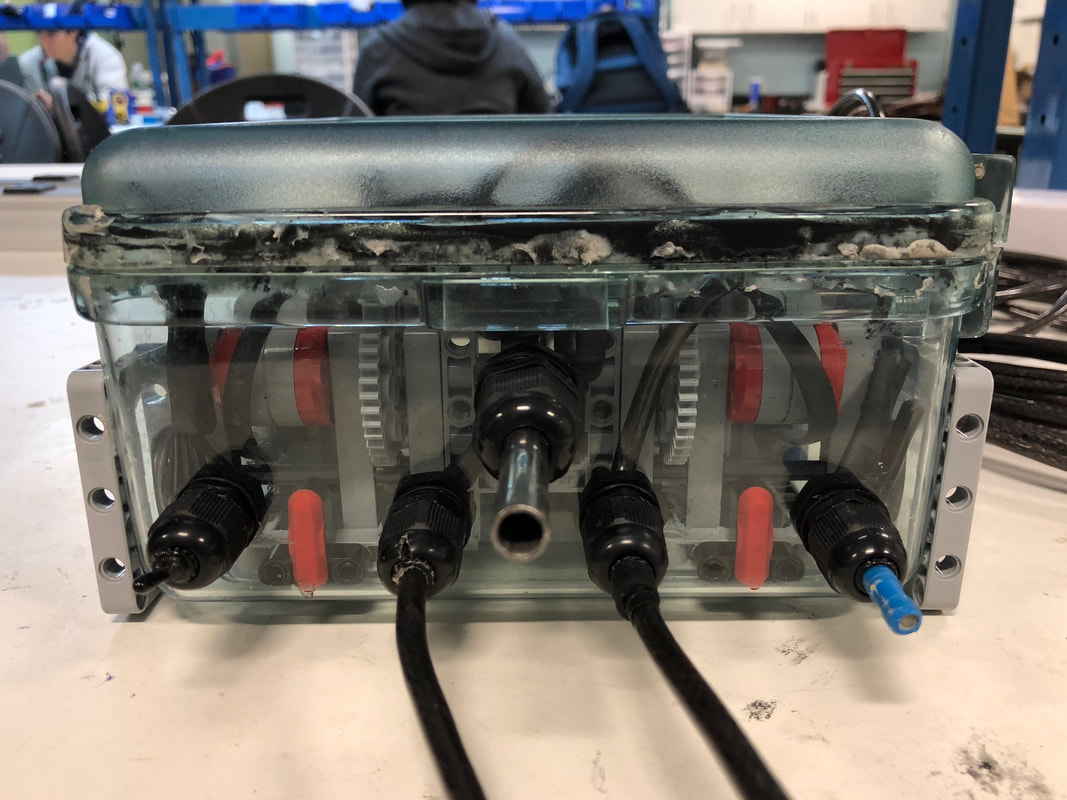
Initially, we used a common lunch container, with a rubber seal to conceal all our electrical components. Although it was extremely watertight, it was not large enough to fit more than the motors and Mindstorm EV3 Brick. We also did not test it more than a foot below the water, and was not sure it would sustain the high underwater pressures we were trying to achieve - up to 30 feet. Container 2: We switched to a second container, inside dimensions 7.5” x 5.5” x 4”, more robust but not transparent, and with bumps and ridges at the bottom. This affected the amount of space useable in the box, and the inability to use a webcam. Consequently, we had to switch to a third container. Container 3: We settled with the third container, GSI Outdoors Lexan M gear box, made from Lexin resin. The larger dimensions, 9.5” x 7.8” x 4”, allowed us to expand what sensors we could use, gear up the motors inside the box, and easily attach to the container itself, given its flat surfaces. As we made modifications to the box for sensors, we drilled holes into the container, and encountered watertight issues. Given the time constraint, this was the best box we could get, and decided to use butyl tape. Butyl tape is an adhesive rubber sealant tape used for waterproof sealings. |
|
Propeller
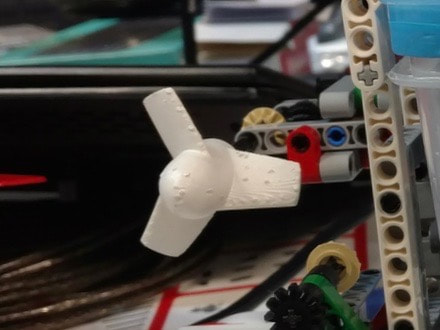
Propeller 1: Small, 3 Blades
Most submarine and ship designs have propellers with three blades that are relatively small to the body of the machine. However, given the constraints of the motor speeds from the LEGO Mindstorm, we had to increase the size and number of blades of the propellers.
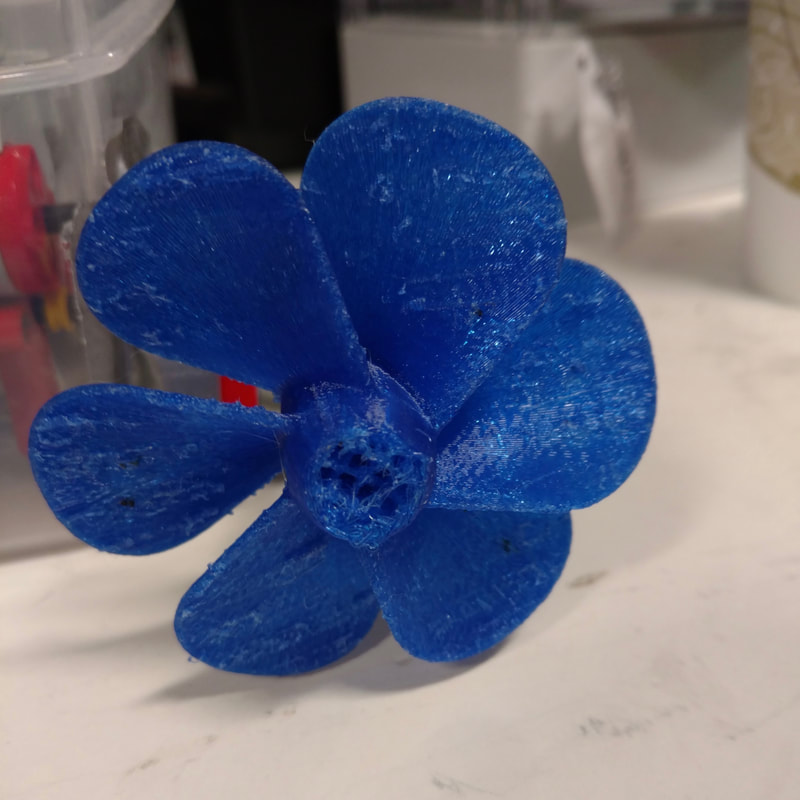
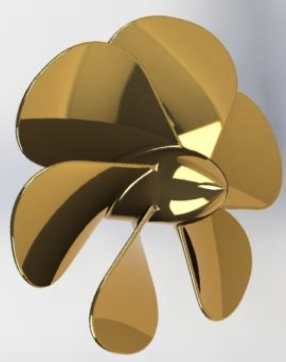
Propeller 2: 72 mm, 6 Blades
This second propeller is also 3D printed, but we upped the size of the propeller and the number of blades. This propeller did increase the speed of our rover and provided enough force to sink and raise the rover. However, the rover still moved very slowly.
Propeller 3: Computer Fans
While looking for a perfect propeller, we stumbled upon computer fans. We used Kingwin case fans for computers, model CF-08LB, 80mm x 80mm with 7 blades, as our final propellers. We took them apart and drilled through them to fit for LEGO pieces, and used plastic bonder glue to attach Mindstorm pieces to the casing of the fan. As they were not 3D printed, they proved a lot sturdier and effective in pushing water.
Most submarine and ship designs have propellers with three blades that are relatively small to the body of the machine. However, given the constraints of the motor speeds from the LEGO Mindstorm, we had to increase the size and number of blades of the propellers.
Propeller 2: 72 mm, 6 Blades
This second propeller is also 3D printed, but we upped the size of the propeller and the number of blades. This propeller did increase the speed of our rover and provided enough force to sink and raise the rover. However, the rover still moved very slowly.
Propeller 3: Computer Fans
While looking for a perfect propeller, we stumbled upon computer fans. We used Kingwin case fans for computers, model CF-08LB, 80mm x 80mm with 7 blades, as our final propellers. We took them apart and drilled through them to fit for LEGO pieces, and used plastic bonder glue to attach Mindstorm pieces to the casing of the fan. As they were not 3D printed, they proved a lot sturdier and effective in pushing water.
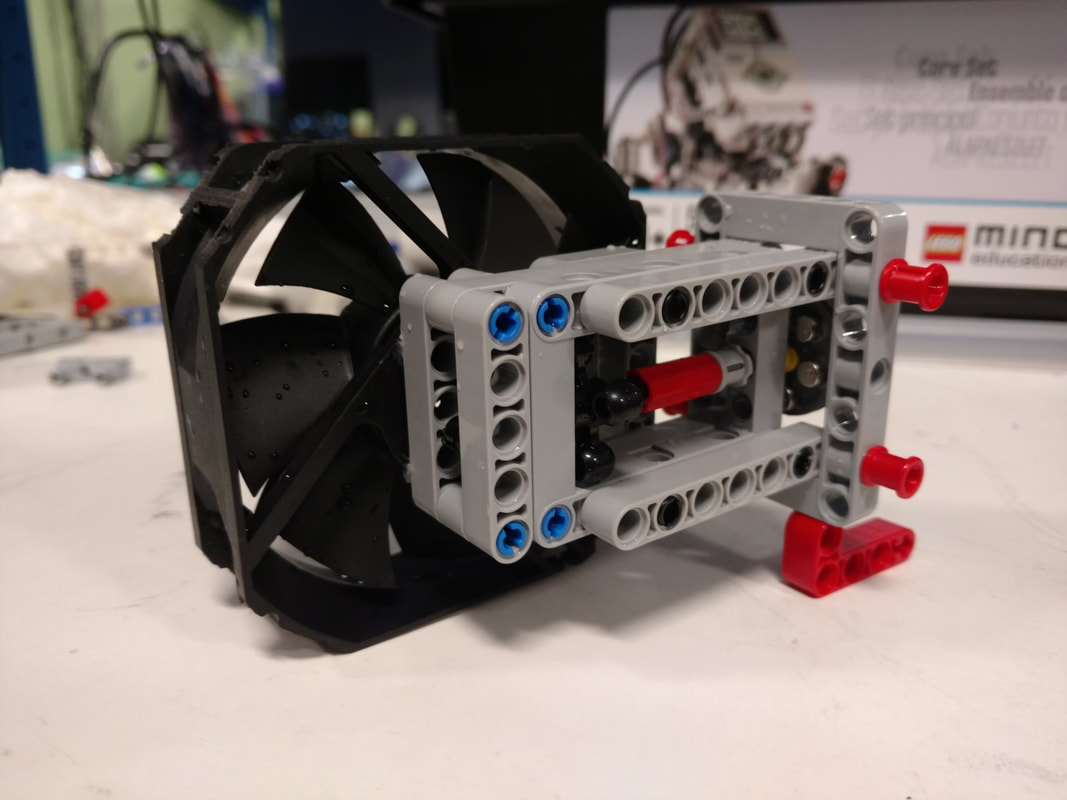
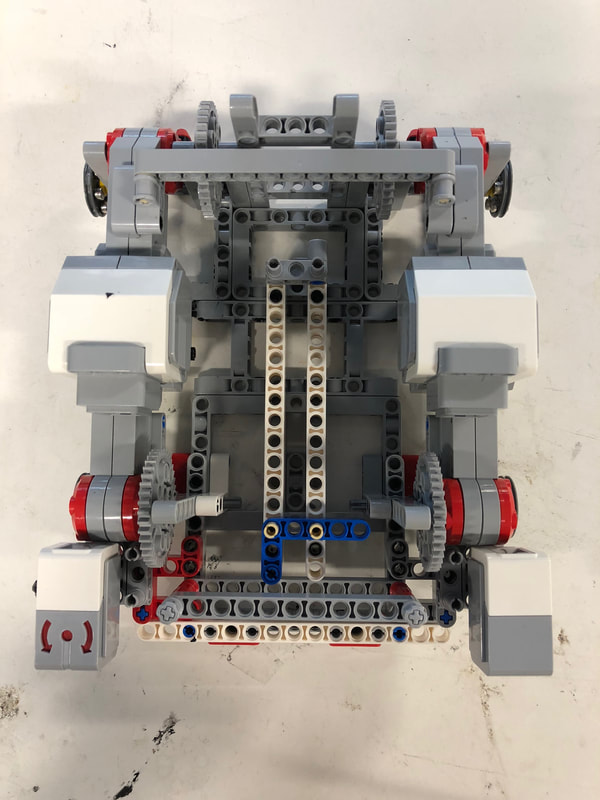
Gearing/Magnetic Coupling
|
With the limitations with how fast the LEGO Mindstorm motors could go, we found two ways that could increase the speed of the propellers - gear ratios and magnetic coupling.
Gear Ratios: After trying many different gear ratios, we settled on a 5:1 gearing ratio as that configuration spun the fastest underwater with the smallest torque. Internal gearing instead of external gearing helped reduce the torque on the coupling for the same speed. Magnetic Coupling: The magnetic coupling was our clever way of keeping the electronics inside while moving the propellers attached outside of the box. By using increased strength magnets N52 instead of N35, the coupling became strong enough that the motors failed before the magnets. |


|
Electrical Components
|
Sensors/Webcam:
We added the basic sensors for underwater uses - salinity, temperature, and pressure. Additionally, we added a Logitech webcam to be able to see underwater. We made each of these sensors individually, and are attached through glands, through holes drilled in the back of the container. Bluetooth Connection: In order to control the movements of the rover underwater, we put a bluetooth dongle inside the rover, and was tethered using an extension USB cable to our computers. |
|
